Interface of policy
Note
See the notebook here
Run in Google Colab
Let’s install the latest version of Poutyne (if it’s not already) and import all the needed packages.
For the first section discussing the policy API, only the Poutyne import is necessary.
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision.datasets as datasets
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision.models import resnet18
from poutyne import Model, OptimizerPolicy, linspace, cosinespace, one_cycle_phases
About policy
Policies give you fine-grained control over the training process. This example demonstrates how policies work and how you can create your own policies.
Parameter Spaces and Phases
Parameter spaces like linspace and cosinespace are the basic building blocks.
from poutyne import linspace, cosinespace
You can define the space and iterate over them:
space = linspace(1, 0, 3)
for i in space:
print(i)

space = cosinespace(1, 0, 5)
for i in space:
print(i)
You can use the space and create a phase with them:
from poutyne import Phase
phase = Phase(lr=linspace(0, 1, 3))
# and iterate
for d in phase:
print(d)
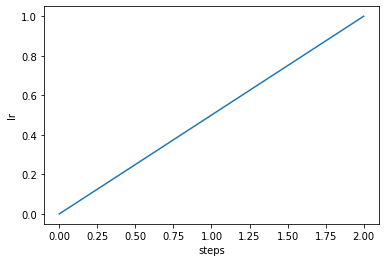
You can also visualize your phase:
import matplotlib.pyplot as plt
phase.plot("lr");
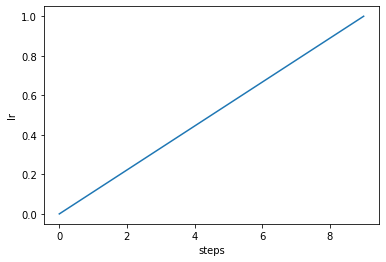
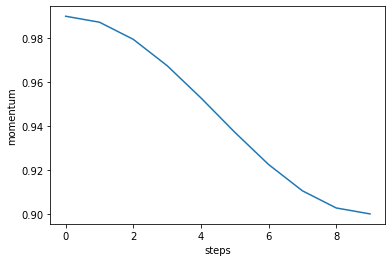
Phases can have multiple parameters:
phase = Phase(
lr=linspace(0, 1, 10),
momentum=cosinespace(.99, .9, 10),
)
phase.plot("lr");
phase.plot("momentum")
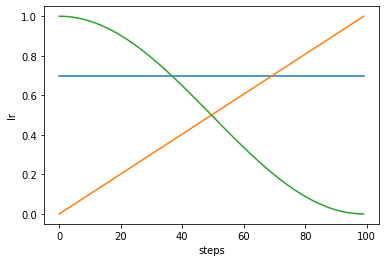
Visualize Different Phases
steps = 100
fig, ax = plt.subplots()
# Constant value
Phase(lr=linspace(.7, .7, steps)).plot(ax=ax)
# Linear
Phase(lr=linspace(0, 1, steps)).plot(ax=ax)
# Cosine
Phase(lr=cosinespace(1, 0, steps)).plot(ax=ax);
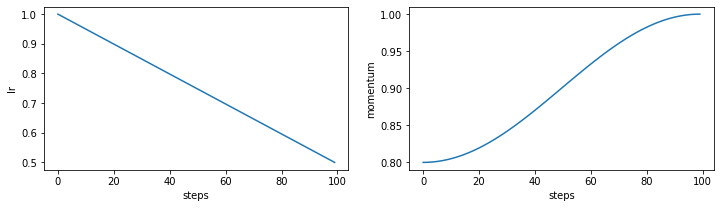
Visualize Multiple Parameters in One Phase
steps = 100
phase = Phase(lr=linspace(1, 0.5, steps), momentum=cosinespace(.8, 1, steps))
fig, axes = plt.subplots(1, 2, figsize=(12, 3))
phase.plot("lr", ax=axes[0])
phase.plot("momentum", ax=axes[1]);
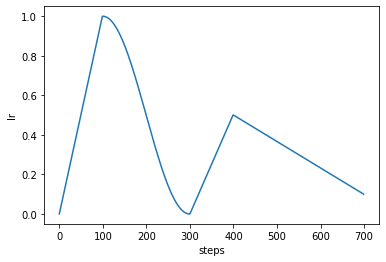
Build Complex Policies From Basic Phases
You can build complex optimizer policies by chaining phases together:
from poutyne import OptimizerPolicy
policy = OptimizerPolicy([
Phase(lr=linspace(0, 1, 100)),
Phase(lr=cosinespace(1, 0, 200)),
Phase(lr=linspace(0, .5, 100)),
Phase(lr=linspace(.5, .1, 300)),
])
policy.plot();
Use Already Defined Complex Policies
It’s easy to build your own policies, but Poutyne contains some pre-defined phases.
from poutyne import sgdr_phases
# build them manually
policy = OptimizerPolicy([
Phase(lr=cosinespace(1, 0, 200)),
Phase(lr=cosinespace(1, 0, 400)),
Phase(lr=cosinespace(1, 0, 800)),
])
policy.plot()
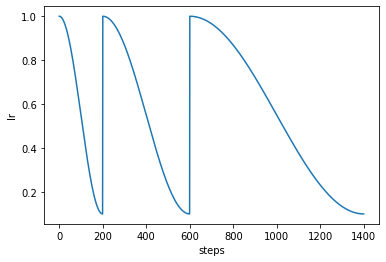
# or use the pre-defined one
policy = OptimizerPolicy(sgdr_phases(base_cycle_length=200, cycles=3, cycle_mult=2))
policy.plot();
Pre-defined ones are just a list phases:
sgdr_phases(base_cycle_length=200, cycles=3, cycle_mult=2)

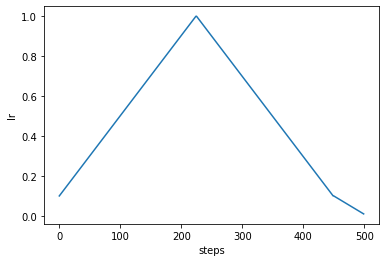
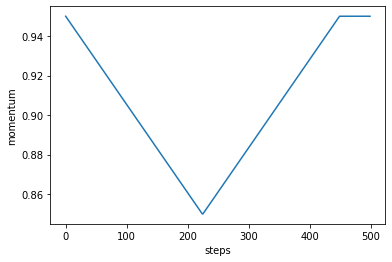
Here is the one-cycle policy:
from poutyne import one_cycle_phases
tp = OptimizerPolicy(one_cycle_phases(steps=500))
tp.plot("lr")
tp.plot("momentum");
Train CIFAR With the policy Module
Training Constants
But first, let’s set the training constants, the CUDA device used for training if one is present, we set the batch size (i.e. the number of elements to see before updating the model) and the number of epochs (i.e. the number of times we see the full dataset).
cuda_device = 0
device = torch.device(f"cuda:{cuda_device}" if torch.cuda.is_available() else "cpu")
batch_size = 1024
epochs = 5
Load the Data
imagenet_mean = [0.485, 0.456, 0.406]
imagenet_std = [0.229, 0.224, 0.225]
train_transform = transforms.Compose([
transforms.RandomHorizontalFlip(),
transforms.ColorJitter(.3, .3, .3),
transforms.ToTensor(),
transforms.Normalize(imagenet_mean, imagenet_std),
])
valid_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(imagenet_mean, imagenet_std),
])
root = "datasets"
train_dataset = datasets.CIFAR10(root, train=True, transform=train_transform, download=True)
valid_dataset = datasets.CIFAR10(root, train=False, transform=valid_transform, download=True)
train_loader = DataLoader(
train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=8
)
valid_loader = DataLoader(
valid_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=8
)
The Model
We’ll train a simple ResNet-18 network.
This takes a while without GPU but is pretty quick with GPU.
def get_network():
model = resnet18(pretrained=False)
model.avgpool = nn.AdaptiveAvgPool2d(1)
model.fc = nn.Linear(512, 10)
return model
Training Without the policies Module
network = get_network()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(network.parameters(), lr=0.01)
model = Model(
network,
optimizer,
criterion,
batch_metrics=["acc"],
device=device,
)
history = model.fit_generator(
train_loader,
valid_loader,
epochs=epochs,
)
Training With the policies Module
steps_per_epoch = len(train_loader)
steps_per_epoch
network = get_network()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(network.parameters(), lr=0.01)
model = Model(
network,
optimizer,
criterion,
batch_metrics=["acc"],
device=device,
)
policy = OptimizerPolicy(
one_cycle_phases(epochs * steps_per_epoch, lr=(0.01, 0.1, 0.008)),
)
history = model.fit_generator(
train_loader,
valid_loader,
epochs=epochs,
callbacks=[policy],
)